
专利示意图
一、技术领域
机器人自主导航领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:202210569964.2
发明人:梁斌、王学谦、翦卓著、陆子鸿、兰斌
2.专利说明书摘要
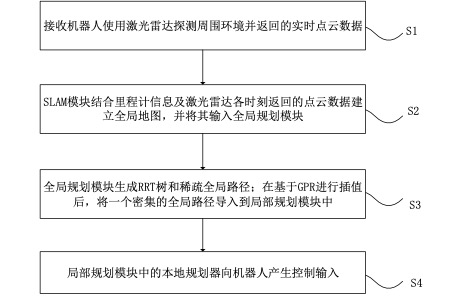
本发明公开了一种基于平面拟合的地面机器人自主导航方法及机器人,包括如下步骤:S1、接收机器人使用激光雷达探测周围环境并返回的实时点云数据;S2、SLAM模块结合里程计信息及激光雷达各时刻返回的点云数据建立全局地图,并将其输入全局规划模块;S3、全局规划模块生成RRT树和稀疏全局路径;在基于GPR进行插值后,将一个密集的全局路径导入到局部规划模块中;S4、局部规划模块中的本地规划器向机器人产生控制输入。本发明更精确地模拟了机器人的真实运行姿态,将问题维度扩展到3维,融合地形分析与路径规划,节省计算资源,提升系统整体的运行速度,在评估地形的可通过性的同时能够用于估计机器人在通过地形时的运行姿态。
3.创新点
(1)将地形的可通行性分析放在采样树的扩展过程中去,避免了对所有点云进行分析,有效的节省了计算资源;
(2)结合了2D与3D 采样算法的优点,将采样(Sample)与步进(Steer)过程在2D平面执行,将寻找拟合平面(FitPlane)的过程放在3D点云表面执行。这样既能快速的将路径收敛到最优,又能够合理的评估地形的信息;
(3)全局规划模块通过线性插值、高斯过程回归等手段增强输出路径的稠密性;
(4)基于点云平面拟合的地形分析方法,综合使用了平整度、坡度、稀疏度三个指标计算可通过性。
4.痛点问题
(1)传统导航算法难以穿越起伏的路面;
(2)在3D路面生成轨迹时间过长;
(3)针对桥梁,坑道等凹陷环境的可通过性问题。
5.技术优势
(1)本发明的方法可以广泛适应于各种野外地形条件;
(2)本发明在确保路径的最优性的前提下极大的节省了计算资源,提高了运行速率;
(3)本方案所要求的机器人硬件平台简单,易于搭建。
三、产业化信息
1.应用场景
(1)可以应用于野外除草机器人,野外勘探的规划与导航;
(2)军用无人车的侦察与巡逻;
(3)安保巡逻机器人的路径规划与导航。
2.商业价值
除草机器人
安保巡逻机器人
军用无人车
野外勘探机器人
光伏电厂的清洁机器人
3.合作方式
面议
注:所有成果未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn
