
Recently, three papers from Tsinghua Shenzhen International Graduate School (Tsinghua SIGS) were accepted into the IEEE International Conference on Robotics and Automation (ICRA).
ICRA is an annual academic conference organized by the IEEE Robotics and Automation Society covering advances in robotics. This year, the conference will take place from May 30 to June 5 in Xi’an, China, and will be held in a hybrid format with onsite and cloud meetings.

(Clockwise from top left) Tian Yu, Lv Weijie, Zhang Xinyu, Chen Huimin, Liang Jiaming
An Overall Configuration Planning Method of Continuum Hyper-Redundant Manipulators based on Improved Artificial Potential Field Method
Author: Tian Yu, Master’s student; Advisor: Wang Xueqian
Continuum hyper-redundant manipulators (CHRMs),with its unique structural advantages, have been widely applied in aerospace, medical or other fields to complete tasks in narrow and multi-obstacle environments. The inverse kinematics of CHRMs is rather complex and its trajectory planning has always been a focal and challenging point of research.
To tackle this issue, the present study proposes an overall configuration planning method of CHRMs based on the improved artificial potential field (APF) method. The method avoids the complicated inverse kinematics and vastly reduces computational complexity. First, a virtual guiding pipeline (VGP) with no obstacles within is constructed based on a known target configuration and minimum safe distance. The movement of the CHRM is restricted to the pipe by the APF method. Then, the study proposes a method to construct a guided potential field in the VGP to solve the local minimum problem of traditional APF methods. Further, to address the issue of contradictory forces in the overall configuration planning, a maximum-work planning strategy is proposed. Simulation results demonstrate the high performance of the method in terms of planning efficiency and environmental adaptability.
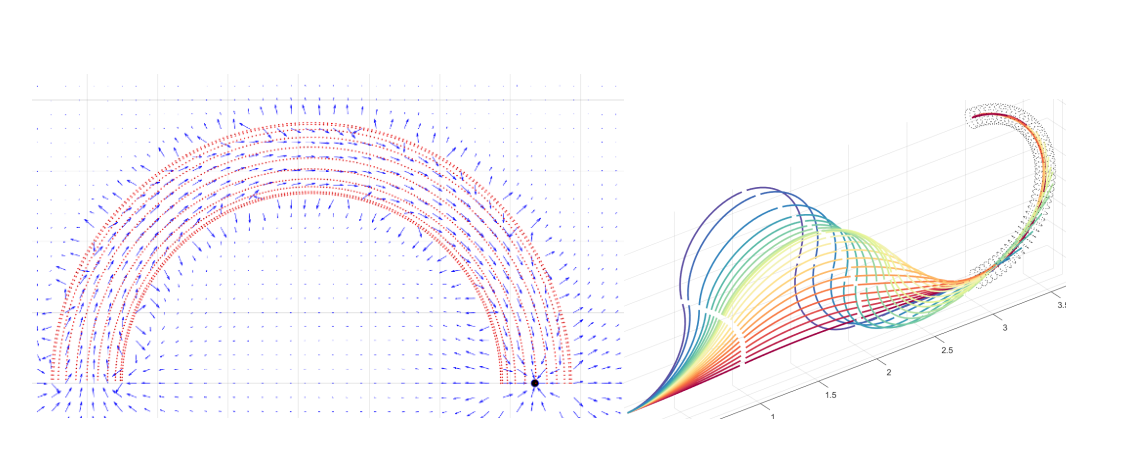
Improved potential field and time series for configuration of planning
ParametricNet: 6DoF Pose Estimation Network for Parametric Shapes in Stacked Scenarios
Author: Lv Weijie, Zhang Xinyu, Master’s students; Advisor: Zeng Long
With the rapid development of intelligent manufacturing, there are a large number of industrial stacked scenarios that require robotic grasping. As there are serious occlusion and partial overlap among stacked parametric parts, grasping such parametric parts is particularly challenging.
To our knowledge, current pose estimation methods are mainly for non-parametric objects. Thus, this paper proposes a new 6DoF pose estimation network for parametric shapes with keypoint learning and Hough Voting scheme (ParametricNet). Firstly, keypoints are defined by the driven parameters and symmetry of the template. Through the point-wise regression network and voting scheme, individual keypoints and the centroid are predicted, and instance segmentation is achieved in the centroid space. At the same time, a 3D reconstruction of the corresponding template part is achieved and determines the template’s centroid and keypoints. Finally, the 6DoF pose of each individual instance is calculated through keypoint fitting.
ParametricNet outperforms the state-of-the-art method by 15% in the average APs (average precision) on the non-parametric pose estimation dataset. ParametricNet also shows excellent learning and generalization ability on our parametric dataset. In the real-world grasping experiment, it was able to stably realize the recognition and pose estimation of unseen parametric parts.
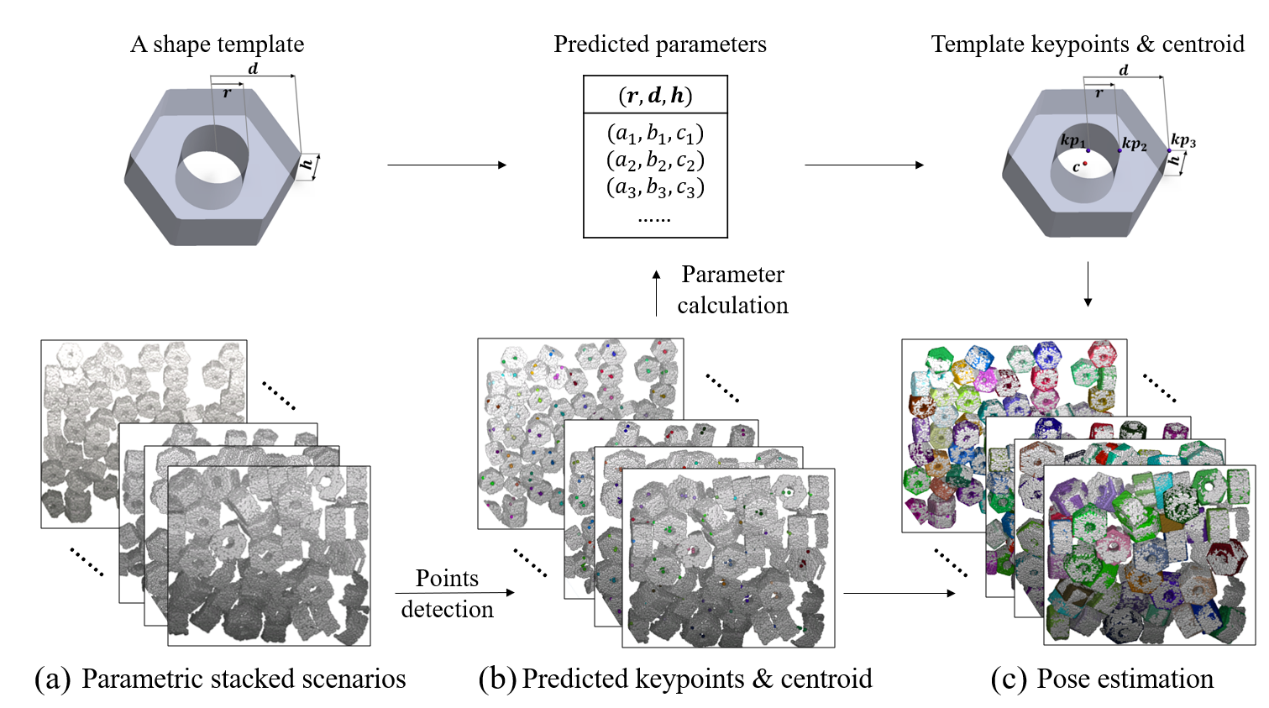
ParametricNet Model
Elevation control of a soft jumping robot
Author: Chen Huimin, Master’s student, Liang Jiaming, Ph.D. student; Advisor: Zhang Min
Insect-scale soft jumping robots have great application potentials in areas such as post-disaster rescue and pipeline flaw detection.
An insect-scale soft robot with controllable jump elevation is proposed. With a dimension of 56×29×3 mm, the soft robot weighs 80 mg and is composed of a shape memory alloy actuator and four electrostatic pads acting as the lock/release units. Made of polymer materials including PET and PI, a laminating process combined with origami technique is used to fabricate the robot structure. Based on the jumping principle of click-beetles, a two-bar jumping mechanism -- an asymmetric active release catapult mechanism was proposed to realize the jumping motion. Besides, elevation control is realized by asynchronously releasing the electrostatic pads in a small time interval. By adding a time interval in releasing the electrostatic pads at the two ends of the robot, a horizontal acceleration is generated at the beginning of the jump process, resulting in an oblique jump instead of a vertical one. The elevation angle can be controlled from 63° to 112° by adjusting the time intervals.
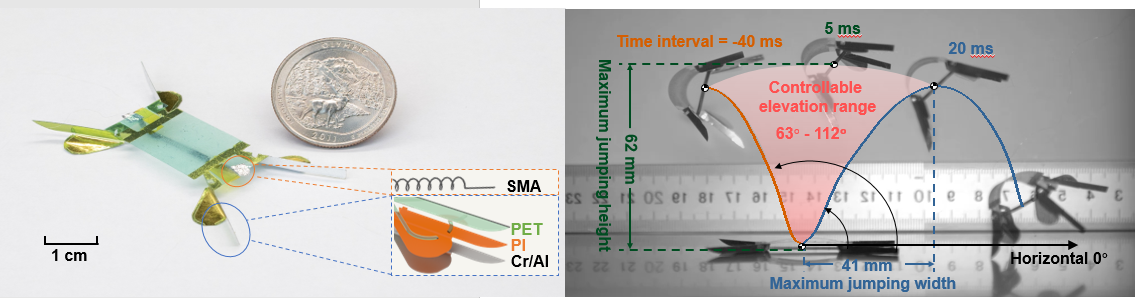
Insect-scale soft jumping robot and its controllable elevation range
Writers: Zeng Long, Wang Xueqian, Lv Weijie, Chen Huimin, Liang Jiaming
Editor: Karen Lee
