
Mechanical metamaterials are architected manmade materials with tailored internal geometries that exhibit exotic and unusual properties. The field initially focused on important mechanical properties, such as negative Poisson’s ratio and compressibility, etc. In recent years, new research focuses have emerged, including shape transformation and motion guidance, broadening mechanical metamaterials’ application potential in the fields of deployable equipment, soft robot, flexible electronic equipment, etc.
However, some challenges remain, including how to design metamaterials that can be deformed into different kinds of predefined shapes to adapt to the changes of the environment. Therefore, it is extremely important to improve the programmability and reconfigurability of mechanical metamaterials. According to the deformation mechanisms of mechanical metamaterials, they can be simply divided into three categories: beam, origami, and kirigami. Although there are overlaps among the three categories, unification can even hardly be achieved between any two of them, which limits the programmability and reconfigurability of mechanical metamaterials. Compared with beam, origami and kirigami have more commonality in essence. For example, kirigami draws cuts array on the basis of origami. So, it’s easier to achieve the collection and unification of deformation between them. What’s more, the deformation of mechanical metamaterials depends on physical contact, such as through human hands or mechanical systems, which limits its application scenarios and environmental adaptability. The magnetically driven method enables materials to accomplish remote, fast, and reversible deformation, so it is desired for improving the programmability and reconfigurability of metamaterials. However, conventional magnetically driven materials are often pure elastomer materials. Their magnetic programming method is single, and their overall shape is unchangeable after fabrication, which limits their programmability and reconfigurability.
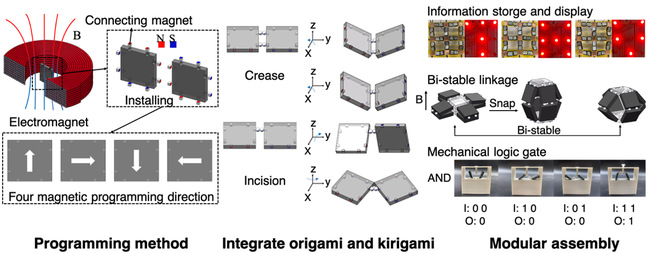
To solve the aforementioned problems, a research team led by Shengli MI’s group from Tsinghua SIGS has explored a kind of programmable and reconfigurable modular mechanical metamaterial based on magnetic drives (Figure 1). It incorporates origami and kirigami mechanisms and can change its overall geometry at will, so as to better adapt to complex changes and requirements of the external environment.
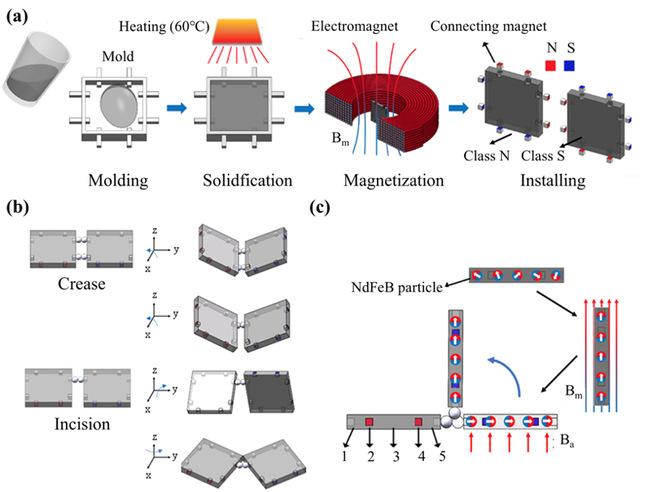
Figure 1. Process and principle of the fabrication method of modular metamaterials.
The motion and deformation were designed to follow the predefined creases and incisions that could be transformed into each other. This metamaterial enables more discrete motion and force transmission and integrated the fold of origami, the rotation of kirigami, and the fold guided by cuts. Such designs lay the foundation for complex three-dimensional structures which can be quickly reassembled and constructed (Figure 2).
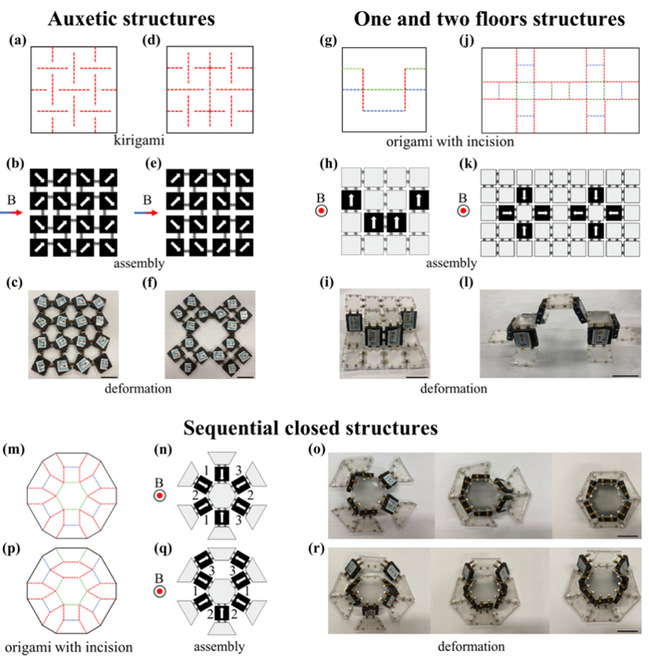
Figure 2. Mechanisms of deformation of modular metamaterials.
Moreover, the basic motion model was established from a new perspective, and several experiments and finite element analyses were carried out to quantitatively reveal its motion and deformation characteristics (Figure 3).
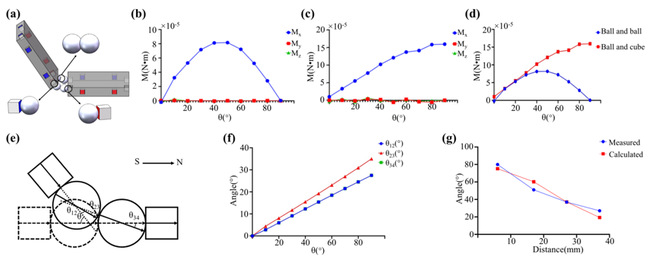
Figure 3. Analysis of basic motion mechanisms.
The energy loss in the deformation process can be reduced compared to traditional pure elastomer materials. Furthermore, interesting applications of the modular metamaterial were illustrated, including information storage and display, multifunctional switch, reconfigurable magnetically driven soft robot, mechanical logic gate, and bi-stable deployable mechanism. The results show that this modular mechanical metamaterial has the merits of high programmability, reconfigurability, and great application potential in many fields.
The research article entitled “Magnetically Driven Modular Mechanical Metamaterial with High Programmability, Reconfigurability and Multiple Applications” was recently published in the journal ACS Applied Materials & Interfaces. The corresponding author is Professor Shengli MI from Tsinghua SIGS. The first author is master’s student Linzhi LI from Tsinghua SIGS. Another co-author is PhD student Hongyi YAO from Tsinghua SIGS.
Link to full article:
https://pubs.acs.org/doi/10.1021/acsami.2c19679
Written by Li Linzhi
Edited by Alena Shish & Yuan Yang
