我院丁文伯副教授团队与合作者在咽拭子采样问题研究上的最新研究成果,以“Visuo-Tactile Sensor Enabled Pneumatic Device Towards Compliant Oropharyngeal Swab Sampling”为题,被机器人领域顶级会议之一的IROS 2023录用,并获得最佳应用论文提名奖。IROS 2023有效投稿数为2,760篇,最佳论文提名为51篇(入选率2%),其中最佳应用论文奖提名共评选出5项,该成果也是该奖项中唯一的华人团队! IROS,英文全称IEEE/RSJ International Conference on Intelligent Robots and Systems,中文全称“智能机器人与系统国际学术会议”,由IEEE主办,涵盖了智能机器人和系统的广泛主题, 重点关注智能机器人系统的感知、决策、控制和操作等方面,是全球机器人领域规模最大、最具影响力的学术会议之一。

图1 获奖证书
非典病毒在2002年至2003年期间引起了严重的全球疫情,但经过国际社会的集体努力,得到了有效的控制和消除。而新型冠状病毒(COVID-19)的传播速度更快,对全球公共卫生和经济产生了广泛影响。咽拭子采样是一种常用的方法,用于检测呼吸道病毒感染,包括冠状病毒。但这种危险、繁重的劳动给医护人员带来了巨大的身体和心理负担。另一方面,即使是在如此严格的防护条件下,医护人员被感染的例子也不胜枚举。因此设计一种安全、稳定的核酸检测设备显得格外必要。
本研究提出了一种具有触觉反馈的新型气动核酸检测设备,如图2所示,该设备的制作成本仅为30美元,采样部分设备质量低于100g,可以在各种机械臂上大规模推广。为了便于快速组装和维修,该设备采用了模块化的设计方法,将夹取和感知部分分离。抓取部分的设计利用软体气动结构模拟了人抓取咽拭子时的手指结构,提高整体的柔顺性,并利用有限元分析和实验证明了夹取装置的可靠性。在感知部分,首次提出了一种具有内凹结构的视触觉传感器,解决了传统传感器成本高、可靠性差的问题。最后,设计力柔顺实验、核酸采样实验、防水实验等验证了该研究提出的设备和算法的可行性。

图2 咽拭子采样设备工作图
除了核酸检测,该设备还可以应用于手术机器人、喂食机器人等需要触觉反馈的人机交互场景,如下图所示。在手术过程中,通过触觉传感器,机器人能够精确地感知和测量组织的硬度、弹性和形状等特征,帮助外科医生更精确地进行手术操作。在养老机器人领域,结合基于触觉传感的末端执行器进行喂食操作,可以为养老康复机器人的应用带来更多的优势和前景。
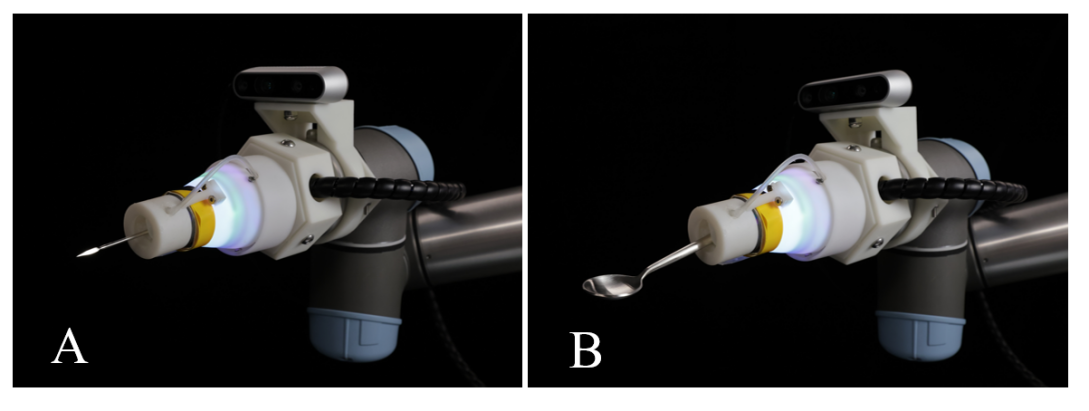
图3 (A)夹持手术针;(B)夹持汤匙
我院2023级博士生李寿杰为该文章的第一作者,通讯作者为我院丁文伯副教授,论文共同作者还包括首尔大学的硕士研究生河明山、上海大学的叶林奇副研究员、我院的王学谦教授和谭俊波副研究员、中山大学附属第七医院的袁金秋副研究员,以及我院的张晓平院士。该项目得到了深圳市科技计划、清华大学深圳国际研究生院鹏瑞青年教师启航项目、广东省基础与应用基础研究基金等项目的资助。
原文链接:https://arxiv.org/pdf/2305.06537.pdf
文/图:李寿杰
编辑:万欣宜
审核:陈超群
