
磁驱动微型软体机器人具备可编程变形能力与多模态运动特性,能够在复杂环境中灵活执行各类操作任务,展现出广阔的应用前景。然而,现有基于弹性体材料的机器人变形能力有限,无法在高度受限空间(如远小于机器人自身尺寸的狭窄缝隙)中自由导航,并且它们的功能受到预先设计形状的限制,难以满足动态环境中实时重构的需求。
磁流体液滴兼具良好的顺磁性与液体的流动性,在外部磁场的调控下,能够实现可编程重构、按需分裂与合并等行为,从而赋予机器人多样化的操作功能。因此,构建面向磁流体液滴的可编程操控平台,有望为海洋微流控、实验室/器官芯片、生物医学工程等领域提供一种全新的微尺度智能操作范式,拓展磁驱动软体机器人在复杂环境中的应用边界。
小型化机器人研究意义
近期,清华大学深圳国际研究生院副教授曲钧天团队围绕磁流体液滴机器人在大规模、独立与可编程操控方面的关键技术难题,成功开发出一套基于电磁线圈阵列的可编程操控平台。通过灵活部署液滴机器人,该平台在数字图案显示、信息编码及流体操作等领域展现出广泛的应用潜力。
团队首先构建了一种高密度分布式电磁线圈阵列,用于在毫米尺度上实现液滴机器人大规模可编程操控。该平台集成了144个小尺寸电磁线圈,能够在113×113 mm²的工作空间内生成多个局部磁场,从而实现多点独立驱动。结合有限元仿真,分析了单个线圈及其铁芯所产生的复合磁场分布特性,并评估了磁力对液滴的驱动效果。平台融合定制驱动电路、视觉反馈模块与多线程软件架构,实现了对磁场的高精度调控,确保机器人响应的实时性与准确性;低功耗驱动保障了系统长时间的稳定运行。
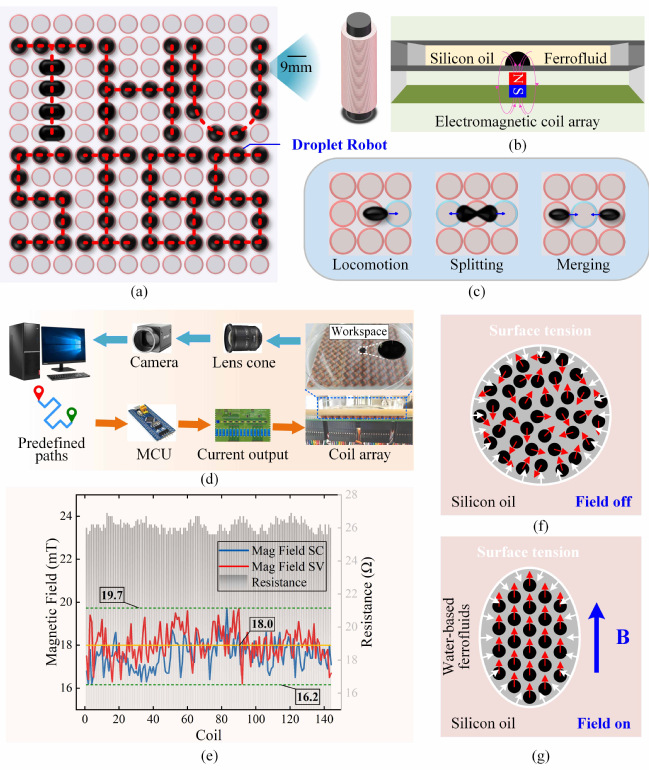
分布式磁场驱动系统概述
其次,团队深入探究了液滴机器人在局部磁场作用下的运动规律与变形机理。通过调节相邻线圈电流的方向与幅值,可以诱导液滴发生可逆分裂与合并。研究发现,当两个线圈施加方向相反的电流时,可驱动液滴产生拉伸形变;进一步调节磁场强度比,可精确控制分裂后的液滴体积比。此外,研究还揭示了液滴尺寸、电压强度与运动速度间的关系,为复杂操控提供了理论基础。
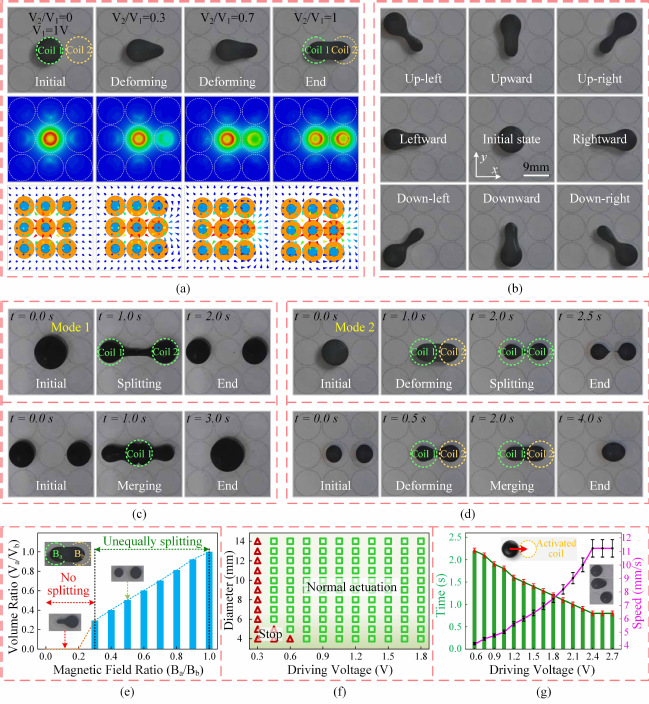
液滴机器人运动和变形的机理与表征
为了实现多个液滴机器人的协同路径跟踪,团队提出了一种基于视觉反馈的离散闭环控制策略。通过顶部相机获取机器人的实时位置,结合预定义轨迹,逐步激活对应线圈驱动液滴机器人遍历子目标点。控制流程引入任务调度逻辑:若两个液滴机器人的路径存在运动干扰,则采用步进驱动方式,确保各机器人独立、安全运行。四个液滴机器人成功完成“SIGS”等复杂路径跟踪,误差控制在1 mm以内,证明了所提策略的有效性。
最后,团队展示了液滴机器人在复杂任务场景下的高效协同能力,包括自主排序、图案重构、数字显示、摩斯编码和流体混合等功能。在排序任务中,结合“归并排序”算法与磁阵列系统,实现多个液滴在有限步数内完成体积升序排列,整体效率较单个机器人操作提升三倍以上。在图案重构方面,系统可以动态调整液滴阵列,快速切换不同字母或摩斯码图案,完成信息的可视化编码。在流体混合实验中,多个液滴机器人分别从不同通道泵入染料,并在混合区完成主动搅拌,展现出该平台在数字微流控、反应调控与材料合成等领域的应用前景。
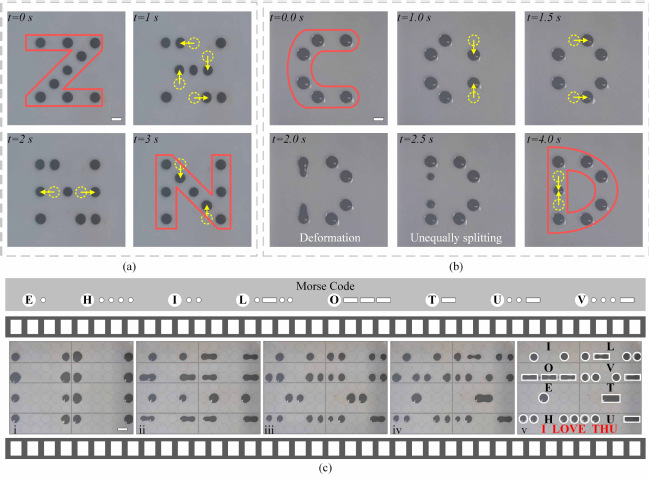
可编程重构示意图
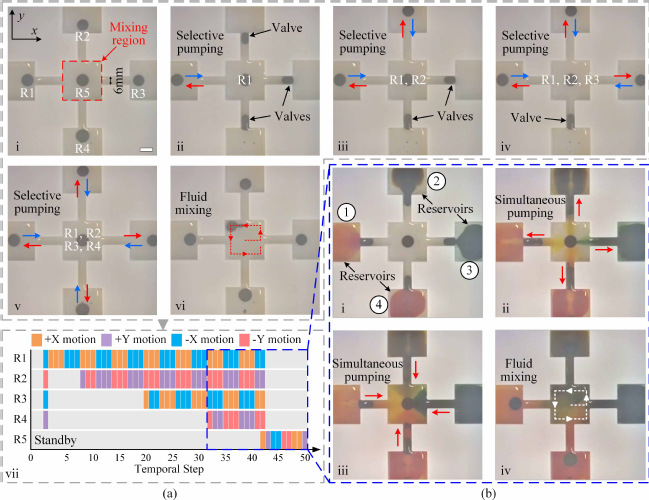
流体混合示意图
该研究成果以“用于大规模磁流体液滴机器人可编程控制的电磁线圈阵列系统”(Development of an Electromagnetic Coil Array System for Large-Scale Ferrofluid Droplet Robots Programmable Control)为题,发表于《IEEE机器人学汇刊》(IEEE Transactions on Robotics)杂志上。论文通讯作者为曲钧天,第一作者为清华大学深圳国际研究生院2024级博士生崔光明,其他合作者包括江南大学教授樊启高和德国癌症研究中心教授丘天。该工作得到了清华大学深圳国际研究生院海外科研合作基金的资助。
论文链接:https://ieeexplore.ieee.org/document/11059837
文:崔光明
编辑:叶思佳
审核:林洲璐




