
软体动物如章鱼、水母和鳐鱼,能够通过在组织内部无缝集成运动、感知与能量供给系统,实现对复杂环境的适应性运动,这种天然架构体现了生物的具身智能。相比之下,传统软体机器人多依赖传感、驱动和能量模块的横向拼接,但受限于结构空间与固有变形,其在集成高能量密度电源方面存在困难,限制了持续运行和动态适应能力。尤其是柔性电池在变形和振动下电化学过程易受干扰,导致容量衰减与短路风险,同时模量不匹配也削弱了机器人运动性能。为此,亟需发展垂直集成方法,在保持机器人柔顺性的同时最大化功能区域利用,实现驱动、感知与供能系统的高效协同,从而推动软体机器人迈向真正的具身智能。
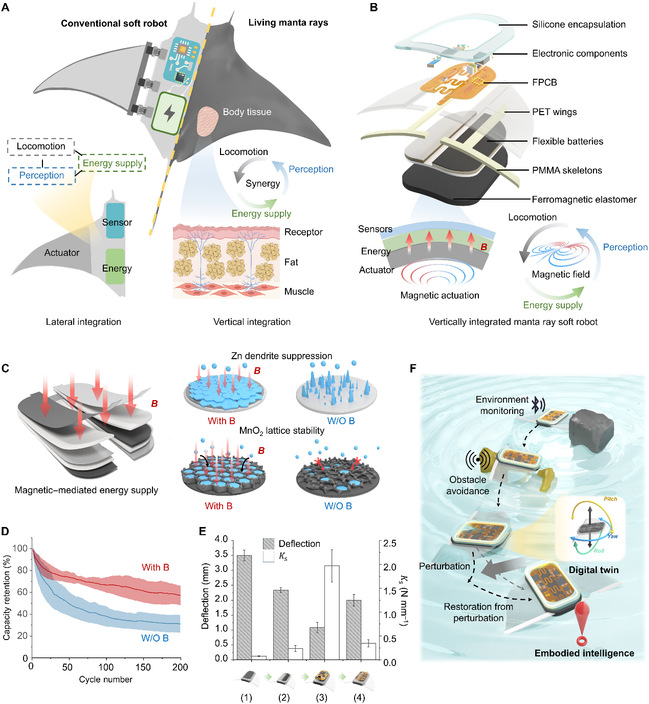
图1 磁场增强的柔性垂直集成机器人-丁文伯团队-国际研究生院
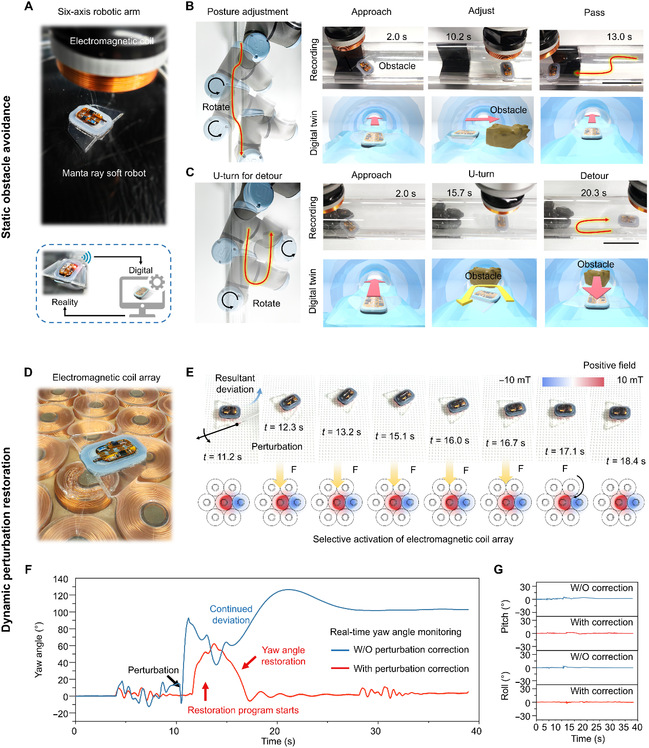
图2 机器人在自主环境探索和扰动纠正上展现智能-丁文伯团队-国际研究生院
近日,清华大学深圳国际研究生院副教授丁文伯所在的智能感知与机器人(Smart Sensing and Robotics, SSR)课题组与副教授周光敏课题组合作提出了一种磁驱动柔性电池集成机器人。该机器人集成的抗形变柔性电池,在机器人固有磁场增强下表现出优异性能,在200次循环后的容量保持率具有57.3%。这种柔顺电池可在机器人本体上实现44.9%的大面积部署,并通过与合理设计的柔性混合电路进行垂直集成,在保持可变形性的同时将额外刚度降至最低。这种执行器–电池–传感器的柔性垂直集成方法最大化了功能区域的利用率,并在仿鳐鱼软体机器人中得以实现,从而构建了一个具备感知、通信和稳定供能能力的无束缚平台。该系统在水下环境中展示了具身智能,包括扰动修正、避障和温度监测等多样化功能,并通过本体感知与环境感知实现了磁驱动运动过程中的实时决策。
该成果以“磁场增强的垂直集成实现无绳软体机器人的具身智能”(Magnetic field–enhanced vertical integration enables embodied intelligence in untethered soft robots)为题,发表在国际期刊《科学.进展》(Science Advances)上,并被遴选为当期封面(Front Cover)论文。
清华大学深圳国际研究生院副教授丁文伯、副教授周光敏,新加坡国立大学助理教授吴昌盛为论文的共同通讯作者,清华大学深圳国际研究生院2021级博士李潇洒、2022级博士生肖潇、新加坡国立大学2022级博士生肖潇为论文共同第一作者。论文作者还包括清华大学深圳国际研究生院2024级博士生龚俊豪、2021级硕士林泽南、2022级硕士吴心茹、2019级博士王东凯、2022级硕士赵润泽、2019级博士王子涵、2020级博士后钟熊伟,新加坡国立大学2022级博士生薛冰、2023级博士生张薇、助理教授林艺良、副教授Patrick Chia、副教授John S. Ho、教授Ghim Wei Ho、教授Cecilia Laschi,加州大学洛杉矶分校博士刘子虓、教授贺曦敏,达特茅斯学院2023级博士生刘士博、教授欧阳伟。
该研究得到国家自然科学基金、国家自然科学基金联合基金、广东省基础与应用基础研究基金、广东省创新创业研究团队计划、深圳市科技计划、深圳市普适数据赋能重点实验室、清华大学深圳国际研究生院、深圳鹏瑞基金会鹏瑞青年教师项目、新加坡科学技术研究局、新加坡国立大学校长青年教授启动基金及RoboLife启动基金的资助。
论文链接: https://www.science.org/doi/10.1126/sciadv.adv9572
文:李潇洒
图:丁文伯
编辑:林洲璐
审核:聂晓梅




