
近日,清华大学深圳国际研究生院副教授曲钧天团队在水下柔顺抓取领域取得系列研究进展,聚焦柔顺抓取与智能感知领域,研发了一系列智能柔性机械手,为水下非结构化环境的柔顺抓取与智能感知等复杂任务提供了高效解决方案。

研究成果当选《先进科学》期刊封面文章
针对传统软抓手难以兼顾静态精细抓取与动态非合作目标捕获的难题,曲钧天团队受自然界捕食机制启发,提出了一种双向解耦的跨模态柔顺机械手,实现了抓取功能的双向增益。该研究的核心创新在于设计了刚柔复合手指与双相超材料掌心,并在此基础上构建了一种形态学的解耦方法与切换机制。通过形态重构实现了平行(主动抓取)与笼状(被动捕获)配置的无损切换,该策略在静态抓取中性能媲美专职软抓手,同时对非合作目标展现出极高的容忍度与能量处理能力。在实验室条件下展现了对异构化物体与非合作目标的卓越处理能力,在水下抓取、工业分拣及空间碎片清理领域具有应用潜力。
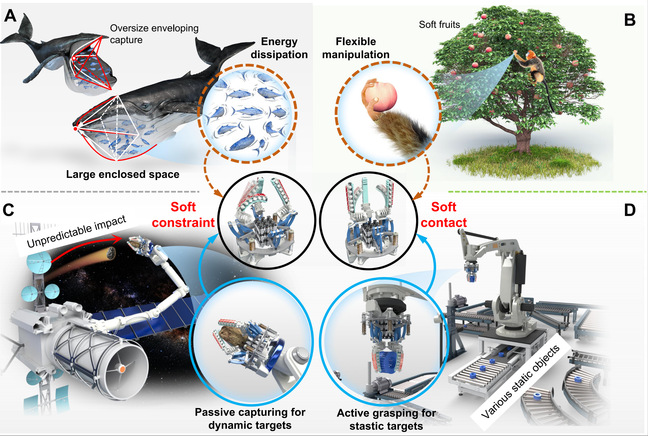
图1软抓手的设计策略
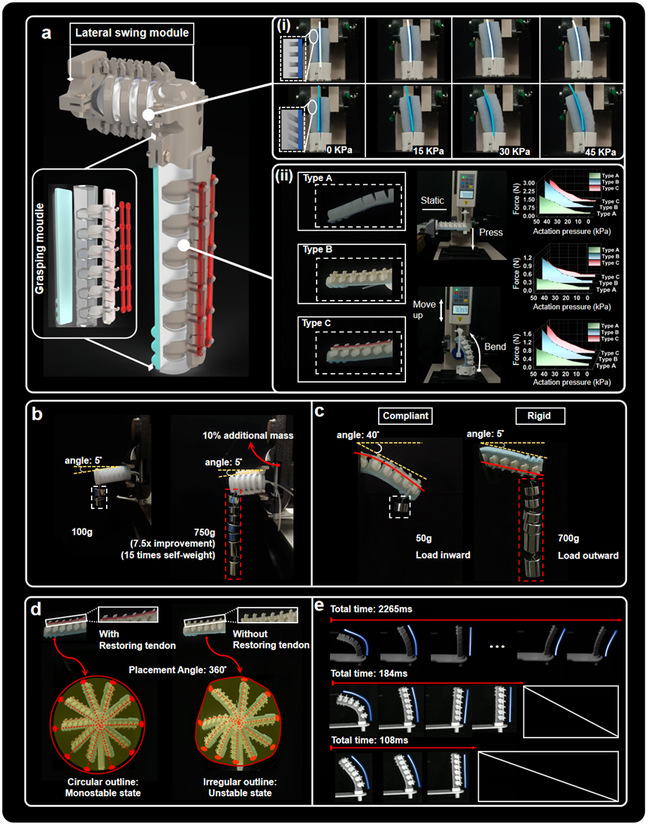
图2刚柔耦合软体指的设计与表征
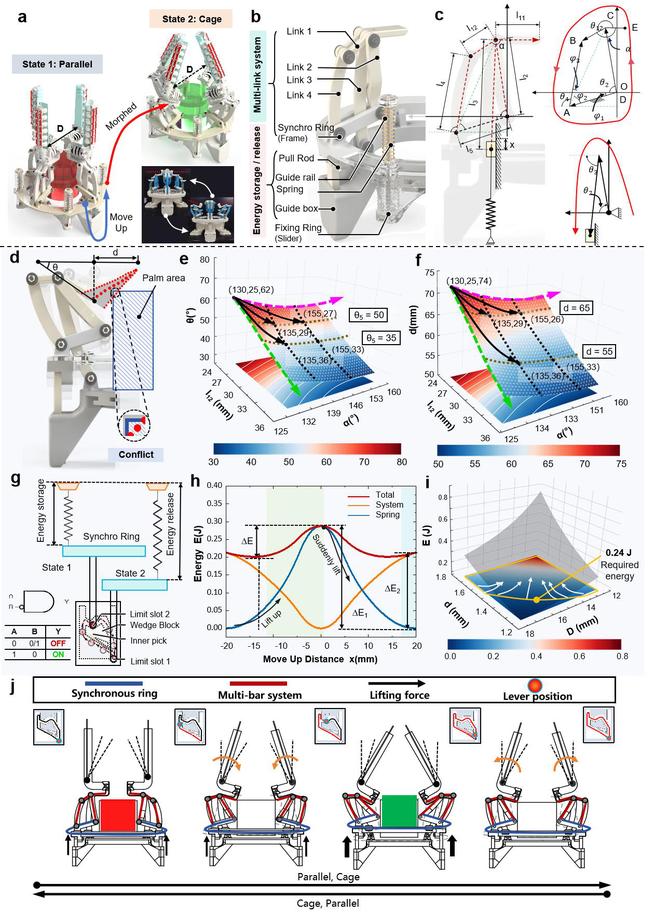
图3基于切换框架的双形态切换机制
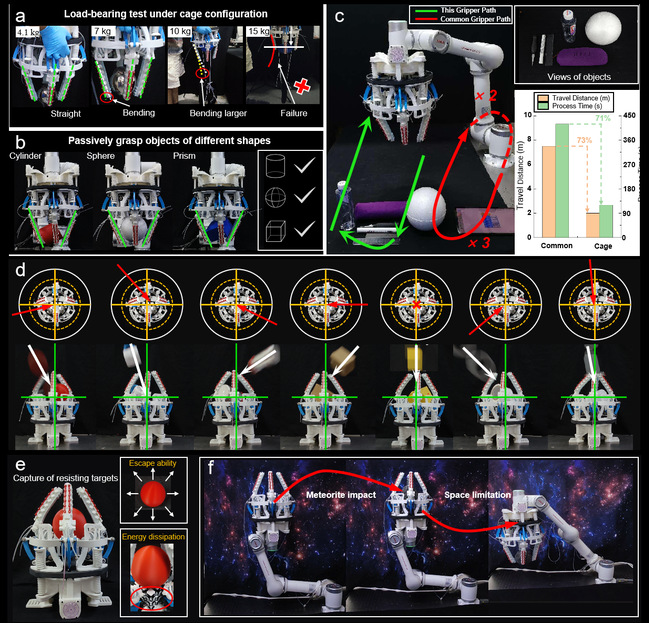
图4笼状配置下的抓取器性能
相关成果以“实现双向增强抓取的仿生形态解耦柔性机械手”(Bioinspired morphology-decoupled soft gripper with enhanced bidirectional grasping capability)为题,发表于《先进科学》(Advanced Science)期刊,并当选封面文章。
论文第一作者为清华大学深圳国际研究生院2024级硕士生黄烨东,曲钧天为通讯作者。
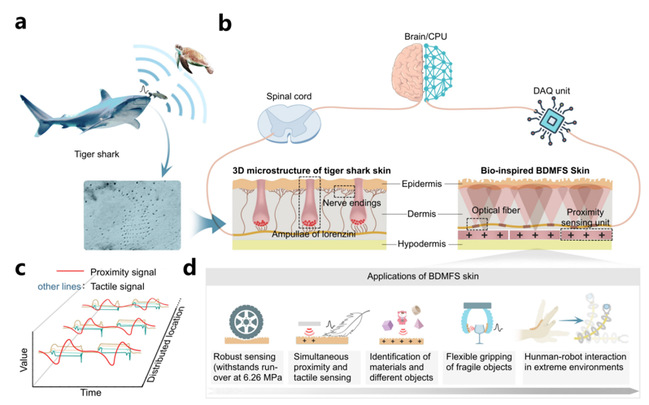
图5仿虎鲨多模态感知机理与应用
实现复杂环境下的可靠感知与智能交互是人机协同系统和智能机器人发展的核心挑战之一。现有柔性传感架构常依赖于离散组件,其结构与传感功能分离,信号往往在时间上耦合而在空间上缺乏一致性。
受虎鲨头部皮肤感觉系统启发,研究团队提出一种分布式多模态柔性传感器,创新性地将S形分布式光纤网络与自供电摩擦电阵列共嵌入单一微结构弹性介电层中。器件兼具6.26 MPa的极端承压能力与5 ms的毫秒级响应速度,并在局部破损后半数节点仍能工作。结合机器学习算法,实现了98.94%的触觉定位准确率与决策闭环,实现水下抓取的遥操作,在深海探测及复杂人机交互中展现出极高的鲁棒性。
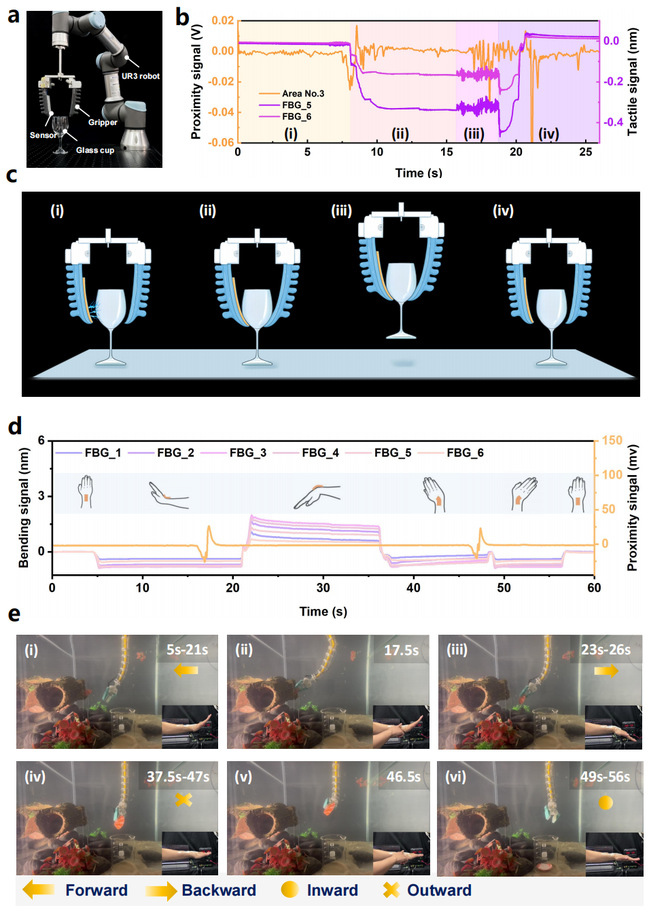
图6柔性抓取与遥操作任务
相关成果以“用于极端条件传感和智能操作的鲁棒仿生分布式多模态柔性传感器”(Robust Bionic Distributed Multimodal Flexible Sensor for Extreme Condition Sensing and Intelligent Operation)为题,发表于《通信·工程》(Communications Engineering)。论文共同第一作者为清华大学深圳国际研究生院2024级博士生毛百进和2024级硕士生黄烨东,曲钧天为通讯作者。
研究成果当选《先进功能材料》期刊封面文章
在深海作业及水下机器人应用中,稳定的抓取能力与同步的环境感知对任务执行至关重要。然而,水下环境普遍存在视觉退化、流体扰动等复杂因素,显著削弱了传统视觉系统及刚性结构的感知能力。
为应对上述挑战,研究团队提出了一种面向水下多模态感知的厘米级刚柔耦合仿生手指系统,实现了紧凑结构下多物理量信息的同步感知。该系统在厘米级尺度集成了光感受器网络,实现接触力、滑动、温度及水压的自解耦同步感知,并能精准区分法向与切向力,并辨识水下岩石纹理。结合滑动反馈与状态机控制,搭载该指尖的机械手完成了无损抓取与环境自适应作业,验证了其在深海探测中的高可靠性。
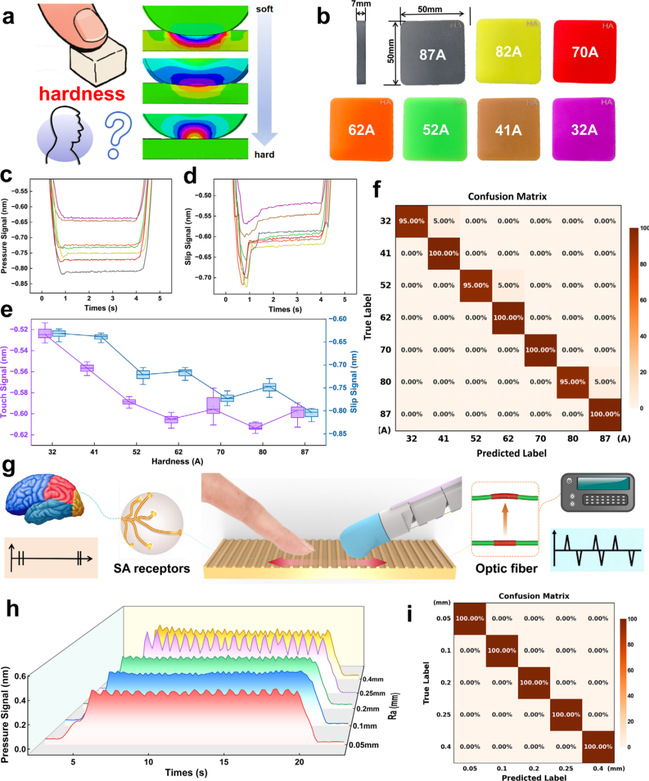
图7基于多模态仿生指尖的材料属性识别
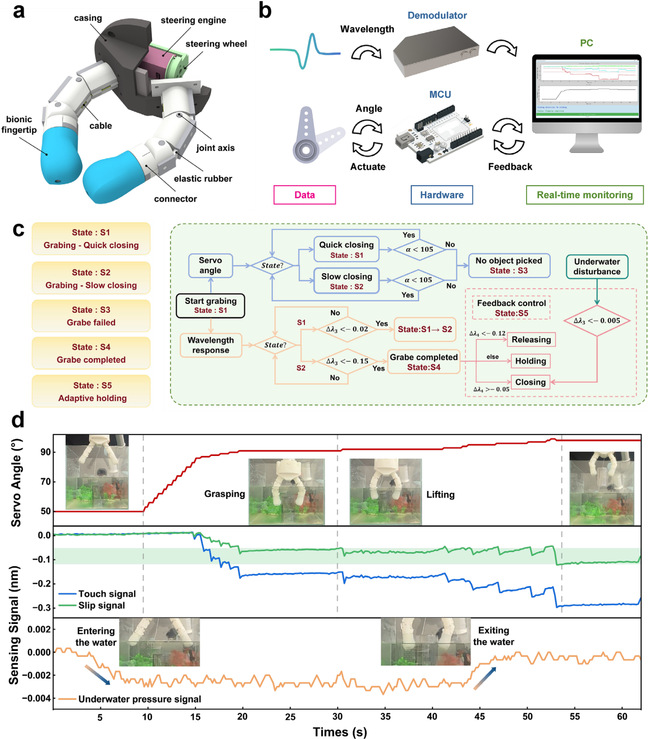
图8水下多模态感知与柔性抓取系统
相关成果以“实现自解耦多模态水下传感的刚柔耦合功能结构集成光学指尖”(A Function-Structure-Integrated Optical Fingertip with Rigid-Soft Coupling Enabling Self-Decoupled Multimodal Unerwater Sensing)为题,发表于《先进功能材料》(Advanced Functional Materials),并当选封面文章。论文共同第一作者为清华大学深圳国际研究生院2024级博士生毛百进和2023级硕士生向喻遥岑,曲钧天为通讯作者。
论文链接:
https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.75073
https://doi.org/10.1038/s44172-026-00653-0
http://doi.org/10.1002/adfm.202522722
文/图:曲钧天团队
编辑:叶思佳
审核:林洲璐




