
专利示意图
一、技术领域
大型机械臂构建技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:202211112600.8
发明人:梁斌、王学谦、徐贺杰、孟得山、姜信宽、李新亮
2.专利说明书摘要
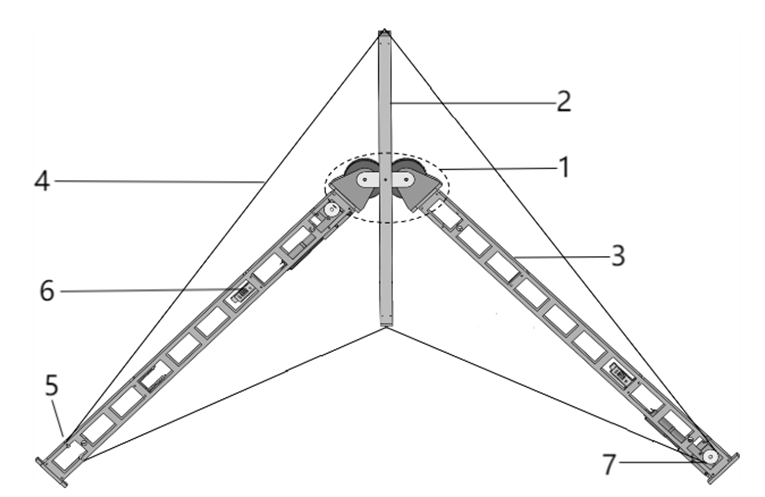
一种轻量化高扭矩肌腱驱动单自由度机械关节装置,包括旋转关节、吊杆、两个臂杆、驱动模块和驱动绳索,旋转关节包括两个转轴,其沿垂直于吊杆方向偏置地设置在吊杆中间部分的两侧,两个臂杆的一端分别连接两个转轴,驱动绳索以拮抗驱动的方式布线于两个臂杆的另一端与吊杆的两端之间,驱动模块连接驱动绳索并控制其收放长度,驱动绳索的张力作用至吊杆的两端,进而驱动旋转关节以及两个臂杆同步转动。本发明的关节结构有助于降低建模复杂度,提高控制精度,弱化或者避免各关节间的运动耦合,且具大角度运动范围。吊杆可增加驱动力臂,提高输出力矩。绳索拮抗控制可改变关节刚度特性。超轻的质量和优异的展收比,可实现快速布置与应用。
3.创新点
(1)提出了一种新型关节模块设计结构,将生物学的肌肉关节原理转移到机械关节,并赋予机械关节更加优异的性能,如大扭矩、高刚度调节能力、良好柔顺度和大运动空间等;
(2)提出了一种绳索驱动的平面关节,可以在实现平面360°旋转运动,具有良好的展收比;
(3)模块化的关节结构设计可以灵活配置包括臂杆、吊杆、绳索布局等部件,具有多种组合方案,可以应对更多应用场景需求。
4.痛点问题
(1)传统刚性关节在关节处的高度集成化,导致此类关节模块结构较为复杂,关节空间拥挤,增加关机体积与质量;
(2)关节输出扭矩受限于电机扭矩,增加了对使用电机的要求;
(3)以往的绳驱关节模块运动空间小,展收比较高,不利于运输。
5.技术优势
(1)TALISMAN采用的铰链结构存在4个转轴,关节左右转动时工作情况需要分别考虑,分析复杂,增加了建立关节模型的难度,降低了关节可控度。本发明设计了新的关节结构,其结构简单,模型简化,具有良好的可控度;
(2)本发明的新型关节结构便于拓展功能,如增添关节联动转置、角度传感器和力矩传感器等。
三、产业化信息
1.应用场景
本发明依据仿生学原理,赋予机械关节堪比生物关节的优良运动性能,在输出载荷、运动空间、刚度调节和展收比方面具备突出优势,并且轻质的桁架结构使其可以应用于大跨度应用场景。
(1)在地面需要大距离装载、运输和装配物品的场景,可以取代传统的吊车、吊塔等机械,使用该机械臂可以具有更加灵活和多功能的操作能力;
(2)在复杂地形进行承载运输,本发明还可以作为足式机器人的长足,如仿蜘蛛足式机器人,具备优异的越障、承载和运输能力;
(3)在太空大型航天器上,本发明可以应用于大跨度操作任务,如空间装配、维修和拆解,以及空间加等。
2.商业价值
船舶航运、港口、军事、航空航天、建筑、消防
3.合作方式
面议
注:所有成果未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn




