
11月24日至26日,第八届软体机器人大会——基础理论与关键技术研讨暨软体机器人创新设计竞赛在南方科技大学举行,来自全国30多所高校与科研单位的300多位专家学者及研究生参加。
经过激烈角逐,全国高校近百支参赛队伍中共有三十五支队伍进入软体机器人创新设计竞赛的决赛,来自清华大学深圳国际研究生院海洋工程研究院曲钧天助理教授带领的由2023级研究生钱献宽、徐依宁、王伟琛组成的团队在决赛阶段脱颖而出,凭借自主原创研制的“三模态刚柔耦合抓手”获“软体机器人物体抓取”赛道的一等奖。![]()

我院获奖团队![]()
![]()

获奖证书和奖杯
在曲钧天的指导下,团队成员采取刚柔耦合的方案设计抓手结构,通过试验验证了该方案能够较大程度提升抓手的负载能力和稳定性,具有复杂工况下适应性、强抓取能力和抵抗外部干扰等多功能特性。团队成员还利用硅胶倒模的方法制备软抓手本体,刚性骨架部分采用先进3D打印技术,经过备赛阶段的反复调试和不断优化,最终得到了性能优异的三模态刚柔耦合抓手。
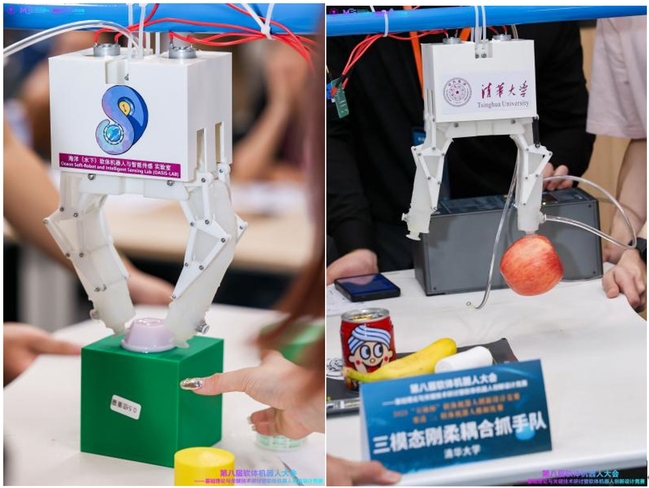
三模态刚柔耦合抓手

参赛团队合影
本次比赛为从事软体机器人领域研究的学生团队提供了一个良好的交流平台,能够促进全国不同团队之间的技术交流与项目合作,推动软体机器人领域实现多学科交叉融合与产业化应用。
文:徐依宁
编辑:戴雨静
审核:陈超群




