
专利示意图
一、技术领域
机器人技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:202310886812.X
发明人:王学谦、徐建乐 、夏崇坤、罗弘、朱贤琨、梁华岳
2.专利说明书摘要
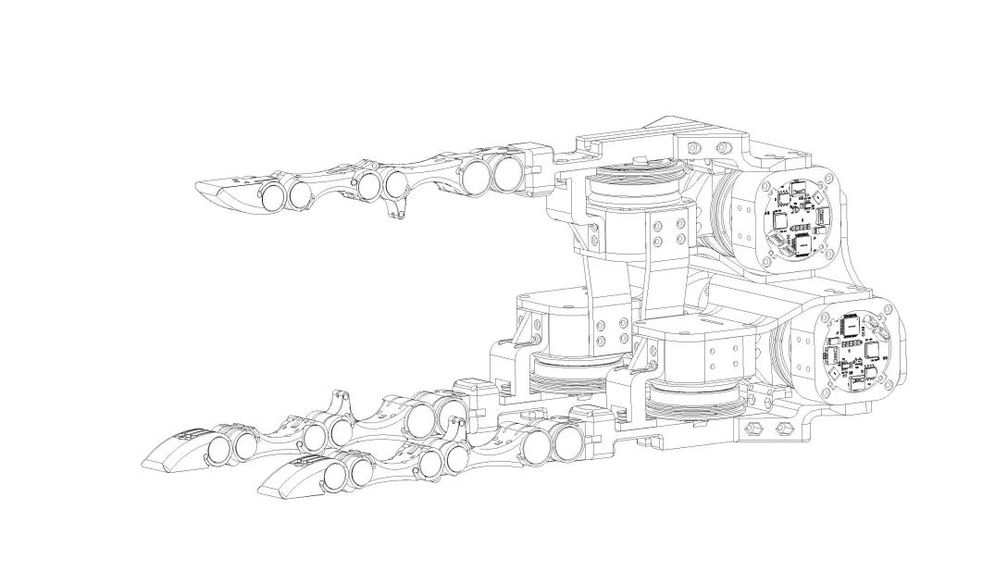
本发明提供一种绳驱机械手爪,包括至少两个手指机构,各手指机构之间固定连接,每个手指机构分别包括手指、驱动模块和固定模块;手指活动连接于固定模块上,手指包含多个指骨,每根手指的各指骨之间活动连接,构成手指关节;在各指骨靠近手指关节处设有径向磁性组;驱动模块固定连接在固定模块上,驱动模块使用绳驱动方式,通过线传动控制手指的指骨运动,使得手指能够水平转动或由伸展状态变为弯曲状态,以及通过径向磁性组的磁力作用使得手指复位到伸展状态。本发明采用的绳驱动和磁复位方式使得手指具有抗冲击、防过载和自复位能力,在径向磁铁径向力的作用下暂时错位的关节能恢复到初始状态而不被机械损坏。
3.创新点
(1)灵巧三指手抓取。每根手指由三个自由度控制,可以获得更加灵巧的工作空间;
(2)具有防过载能力和自复位能力。磁复位绳驱三指灵巧手使用了尼龙绳或钢丝绳进行缠绕从而驱动关节运动,并使用了径向磁铁进行关节的自复位,在结构上直接减去了传统灵巧手中使用弹簧的压缩行程进行关节复位的,使得结构简化;此外使用绳驱和磁铁复位使得手指具有抗冲击、防过载和自复位能力,当抓取物体超过手指本身能力极限或者收到外力冲击时,手指会以“骨折”的形式暂时错位,当物体或者外力冲击移开时,在径向磁铁径向力的作用下暂时错位的关节又将恢复到初始状态而不被机械损坏;
(3)执行机构惯量小,响应迅速。磁复位绳驱三指灵巧手采用的驱动器后置的方案,在末端执行机构上无任何驱动器和传统传动结构,这使得手指自身的惯量小,在驱动器驱动时响应迅速。
4.痛点问题
本发明提出一种基于磁复位的绳驱动三指灵巧手,在尽可能小的体积下集成了9个自由度,即每个手指有3个自由度,由3个电机进行驱动使得手爪更加灵巧,在手指的初始状态复位上使用的径向磁铁代替传统弹簧方式进行复位,缩减去了使用弹簧复位时引入的弹簧变化行程进一步缩小了体积,此外所有关节使用绳驱动,使得其拥有了传统刚性手不具有的柔顺性、抗冲击性、防过载性;以及9个自由度的灵巧性。
5.技术优势
(1)使用传统的齿轮、蜗轮蜗杆等传动方式会增加末端执行机构的惯量,不能达到一个较为灵巧的操作;
(2)现有绳驱动三指手爪集成度较低,每个手指上自由度少;
(3)大部分机械爪抗冲击性能很差,极限过载或收到外部冲击的情况下会损坏自身机械结构;
(4)手指的驱动部分的较为庞大,主要原因是使用了舵机进行驱动或者其他减速电机导致机械手体积增加。
三、产业化信息
1.应用场景
服务机器人领域可以使用此灵巧手以完成更多需要灵巧操作的任务
2.合作方式
面议
注:所有成果未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn




