
专利示意图
一、技术领域
机械臂技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:202311379340.5
发明人:梁斌、王学谦、罗弘、夏崇坤、刘厚德、谭俊波
2.专利说明书摘要
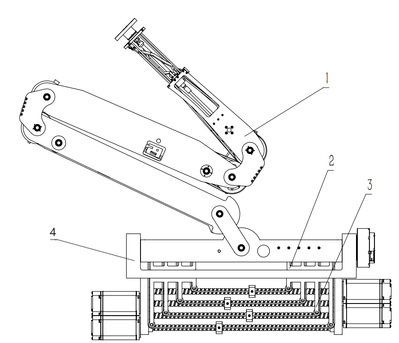
本发明公开了一种绳驱机械臂,包括机械臂运动机构、解耦机构、驱动机构和基座,机械臂运动机构和驱动机构分别设置在基座的两侧,解耦机构设置于机械臂运动机构和基座之间,并分别与机械臂运动机构和基座连接;机械臂运动机构包括驱动绳索,解耦机构将驱动绳索从机械臂运动机构过渡至基座后,驱动绳索连接在驱动机构上,驱动机构控制驱动绳索的收放长度,驱动绳索的张力通过解耦机构作用至机械臂运动机构,以驱动机械臂运动机构运动。本发明的绳驱机械臂的解耦机构结构简单,易于拓展,能够实现完全机电分离,从而机械臂的机械臂运动机构和驱动机构实现完全解耦,大幅减小运动部件的质量和惯量。
3.创新点
(1)设计了一种实现完全机电分离的绳驱刚性臂,减小了机械臂运动部件的质量和惯量,提高了机械臂运动中的安全性和交互性;
(2)相对于市面上其他实现机电分离的绳驱刚性臂,该设计结构简单,易于拓展。
4.痛点问题
绳驱机械臂采用绳索进行远程驱动,可以将驱动电机集成到一起,实现部分机电分离,可减轻运动部件的质量和惯量。然而,受限于解耦机构的设计,当前绳驱机械臂并未实现全自由度机电分离,肩部仍然采用传统模块化关节方案,臂杆的驱动电机、减速器等电气元件大多布置在机械臂肩关节端,为了进一步降低运动部分的质量和惯量,本发明研制了全自由度机电分离的绳驱刚性臂,提出了一种新型的解耦结构,能实现驱动绳索的运动解耦。
5.技术优势
(1)采用更简单的结构实现了被动解耦;
(2)机械臂的电气元件全部集成布置于基座端,大幅减小了机械臂运动部件的质量和惯量;
(3)驱动绳索布置简单,摩擦影响因素小。
三、产业化信息
1.应用场景
(1)本发明提出一种机电分离式的绳驱刚性臂,能够大幅减小机械臂在任务中的质量和惯量,从而提高机械臂的安全性和可交互性;
(2)可以使用在人机交互的作业或是对机械臂运动灵敏性要求高的场景中。
2.合作方式
面议
注:所有成果未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn




