
专利示意图
一、技术领域
机器人技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:202311240550.6
发明人:丁文伯、穆世龙、李寿杰、赵洪发、宋子午、王子涵、陈鑫磊、黄绍伦
2.专利说明书摘要
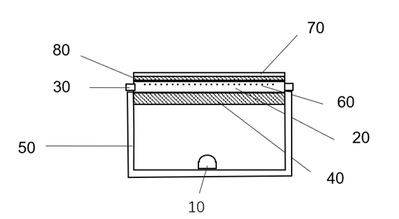
本发明公开了一种具备接近觉和触觉感知的多模态传感器及系统,其中具备接近觉和触觉感知的多模态传感器包括摄像头、透明基底、照明模块、支撑框架、摩擦层和电极层,摄像头、透明基底和照明模块设置在支撑框架上,透明基底具有标记图形,摄像头用于捕捉标记图形的变化信息,照明模块用于为摄像头提供照明,电极层设置在透明基底上,摩擦层设置在电极层上,其中透明基底、摩擦层和电极层为柔性材料,物体接近电极层或与摩擦层接触而带来电势变化或电子转移,由电极层产生电信号输出。本发明结合摩擦电传感和视觉触觉传感技术,实现了对接触和非接触刺激的有效识别和感知,通过这种协同作用,可以实现精确的非接触式交互和触觉感知。
3.创新点
(1)通过结合摩擦电传感和视触觉传感技术,本发明实现了对接触和非接触刺激的有效识别和感知。这种协同作用提高了感知的准确性,尤其是非接触式交互和触觉感知;
(2)本发明中基于摩擦纳米发电机的传感器部分,能在非接触时感知外部物体的空间运动,如距离和运动状态,而在接触时,可以通过摩擦产生带有材料属性信息的电信号;
(3)本发明通过对多模态信号进行预处理,如降噪和调理,并采用特征提取算法进行信号融合分析处理,从而实现更高效的物体表面材料属性识别。
4.痛点问题
(1)现有触觉传感器无法对非接触刺激有响应;
(2)现有传感系统由于制备工艺复杂,集成度低,无法提供丰富的接近觉和触觉信息;
(3)现有传感系统无法充分融合多模态数据,提供更加精确地材料属性识别。
5.技术优势
(1)本发明所提出的多模态传感融合技术,具体为摩擦电传感和视触觉传感技术,能够实时的对接触和非接触刺激的有效识别和感知;
(2)通过搭建卷积神经网络对摩擦电和视触觉数据融合处理,实现高精度的接触物体的表面材料属性判定;
(3)本方案成本低,系统制作与搭建方便,在设计方面巧妙将基于摩擦纳米发电机原理的柔性传感器设计视触觉传感器的柔性基底上,结构紧凑,有机结合。
三、产业化信息
1.应用场景
(1)高级机器人交互:本技术能够使机器人对接近或接触的物体进行高度敏感的识别,对机器人在复杂环境中的操作、物体抓取、避障等活动提供了强大的支持;
(2)工业自动化:对于自动化流水线上的机器人,本技术可以提供更精确的材料属性识别,从而帮助机器人更好地进行质检、分类和处理;
(3)医疗领域:在远程手术或机器人辅助手术中,医生可以通过本技术得到更精确的触觉反馈,对手术工具与人体组织的接触或接近进行实时监测。
2.商业价值
此项技术拥有巨大的商业前景,对于高级机器人交互领域行业有以下市场价值:
(1)本发明可被大量部署于现有人形机器人,末端执行器或者机器人躯干表面。以提高智能机器人的多模态感知能力;
(2)本发明还可以部署在工业自动化或者医疗领域的机器人末端,提高机器人操作精确性、减少各种风险,提高产品质量、减少生产成本。可以进一步扩大机器人的应用场景,使之在搜索救援,物品搬送,家居机器人、智能家居设备等场景具有更加可靠的表现。
3.发展规划
(1)完成原型机的进一步测试,将其产品化并与初步的合作伙伴进行实地应用测试。同时深入了解各行业对此类传感技术的需求,为产品迭代提供方向;
(2)与大型机器人制造公司或系统集成商进行初步合作,引入本技术进行试点;
(3)该技术未来可应用至各种智能机器人以及其他机器人平台,实现高感知能力与决策机器人装备的国产化,快速提高我国在机器人领域的水平;
(4)该技术通过推广本发明所提出的触觉感知系统在机器人平台的部署以及相关技术服务及工程咨询等方式均可能占据市场。
4.合作方式
面议
注:所有成果未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn




