
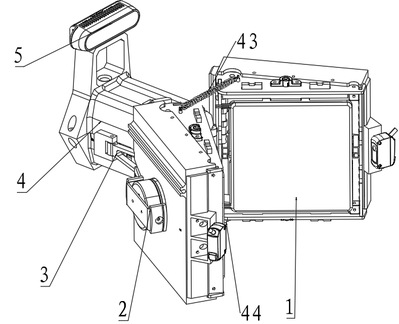
专利示意图
一、技术领域
机器人技术领域
二、专利介绍
1.专利信息
专利类型:发明
专利权人:清华大学深圳国际研究生院
申请号:202311395431.8
发明人:梁斌、刘厚德、廖滔、王学谦
2.专利说明书摘要
一种基于二稳态的多传感融合的末端执行器及机器人,包括一对感知夹爪装置、抓取力控装置、二稳态控制装置及深度感知元件,感知夹爪装置包括感知膜和压力传感器,二稳态控制装置通过弹性机构耦合到感知夹爪装置,抓取力控装置耦合到感知膜,二稳态控制装置在初始时克服弹性力使一对感知夹爪装置张开,在深度感知元件感知目标物体进入抓取范围时释放弹性力使一对感知夹爪装置闭合,抓取力控装置根据压力传感器感知的感知膜表面的压力状态,在抓取成功前控制感知膜内收以对目标物体进行无损抓取,和在抓取成功时释放感知膜对目标物体施加压力。本发明在抓取速度、抓取稳定性及无损性、智能化感知问题以及整体设计小型化方面具有显著优势。
3.创新点
(1)本发明的末端执行器设计了感知夹爪装置、抓取力控装置、二稳态控制装置、外壳及深度感知元件,可以结合抓取预测算法对空中高速移动物体进行超快速、无损抓取,并进行抓取物的感知工作,整体设计自动化、智能程度高;
(2)本发明的末端执行器中,利用拉簧、气缸、电磁铁组成二稳态控制装置,拥有动作迅速、二稳态状态维持稳定等特点,且可根据需求简易更换不同线径的拉簧,快速调整感知夹爪的夹持速度,具有较好的快换特性;
(3)本发明的末端执行器中,在感知夹爪装置基础上设置抓取力控装置,使利用二稳态特性快速抓取时能及时调整夹爪对目标物体的作用力,保证无损抓取目标物体,保证抓取的质量;
(4)本发明的末端执行器中,结合镜面反射原理及仿照蹦床设计视触觉传感器,相比传统视触觉传感器的设计,降低了抓取物体受损的可能性,并提升了末端执行器的小型化程度;
(5)本发明的末端执行器中,结合深度相机、激光测距传感器、压力传感器、光电开关、视触觉传感器等多种传感装置,组成多传感融合感知系统,提高了抓取前、抓取时、抓取后的智能化程度。
4.痛点问题
本发明公开了一种基于二稳态的多传感融合的末端执行器及抓取方式,将二稳态特性运用于抓取末端之中,并将多传感器数据融合,对物体抓取前、抓取时,抓取后进行智能化感知,可以实现对高速移动物体的快速、无损抓取,解决了当今已有的快速抓取末端执行器无法保证无损抓取,智能化不足等问题。
5.技术优势
(1)不使用纯柔性或纯刚性的结构设计,采用柔性+刚性的设计,适用于更多的场合和需求;
(2)现有快速抓取末端执行器无法在快速抓取时进行精准力控以保证抓取的无损性;
(3)现有快速抓取末端执行器未具备智能感知功能,智能化严重不足;
(4)现有对二稳态在末端执行器上的应用研究较为空白,市场上暂无运用二稳态的抓取装置。
三、产业化信息
1.应用场景
能运用于未知环境的未知物体抓取、运动类机器人的快速抓取、移动中物体的告诉抓取等领域中的任务。
2.合作方式
面议
注:所有成果未经授权,请勿转载
联系方式:ttc@sz.tsinghua.edu.cn




